Ф���� ���� �ڵº� ������
��������ͨ��ѧ��е����ѧԺ������710049��
ժ Ҫ����
�ؼ��ʣ���ѧ������������Ӱ����������ƽ�����Ա궨
��ͼ����ţ� TP393 ���ױ�ʶ�룺A
Study on the Technologies of Rapid Three-dimension Optical Measurement for Key Points on Large Complex Components
XIAO Zhenzhong LIANG Jin YU Dehong TANG Zhengzong
(School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China )
Abstract ��.
Key words��Optical Measurement��Close Range Photogrammetry��Bundle Adjustment��Camera Self-Calibration
1 ����
��
2 �ؼ�����
1����־����
�ڿ�ʼ����ǰ����Ҫ�ڱ������ճ����־�㣬�����Ĺ��̾���ͨ��������Ĺ���������λ�õ�ͼ���ؽ�����־�����ά���ꡣ����ʹ������Բ�α�־�㣬��ͼ1��ʾ���ڵװ�ɫԲ��ʹ��л��α����Բ�α�־�㡣

ͼ 1 ��־��ͼ��
ʹ��Բ�α�־����Ի�ñȽϸߵļ�⾫�ȣ����л��α���ı�־������Է����ʵ��ͬ�����ƥ�䣬����ʵ�������̬�Զ�������Բ�α�־���ھ���ͶӰ����ͼ���ϳ���Բ�Σ���־�������̼�ͼ2�����Ƚ���ȡ��ͼ��ת��Ϊ8λ�Ҷ�ͼ��Ȼ��ʹ��Canny���ӽ��б�Ե��⣻�ڽ�����������ܵ���Բ�߽磬ͬʱ�ų�����
Canny��Ե���������Բ�ֱ�Ե��������Բ��Ե������С���������Բ����һ�ܱ��뻷���ڸñ���ֵ�DZ����־������־�����
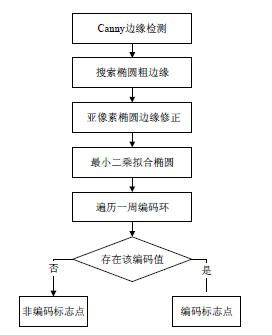
ͼ 2 ��־��������ͼ
�ܵı�Ե����ȷ��Ϊ��Բ�߽��ͼ���ʹ���ݶȾ�ֵ������������������Ȼ��ʹ����С���˷���ϵõ���Բ���ĺͳ����ᡢ��ת�ǵ���Ϣ������Ը���ԲΪ���ģ�������Χ��ԭʼ�Ҷ�ͼ���лҶȲ������õ����뻷�ı�2
�룬������ڸñ���ֵ������Ϊ�DZ����־�㣬����Ϊ�DZ����־�㡣
2�������̬�Զ�����
ÿһ�������̬����ͶӰ����λ��S(X��Y��Z)����ƽ����̬��(ω��ψ��κ)������Ԫ�ء������̬�������ȷ��ÿһ��ͼ���������ⷽλԪ�صĹ��̣�����Զ���;��Զ������֡�ȷ������ͼ����Է�λ�Ĺ��̽�����Զ���ȷ��һ��ͼ�����﷽����ϵ�еľ��Է�λ�Ĺ��̽������Զ��������̬�����ǹ�ѧ�����Ļ�������ȷ�������̬�Զ�����Ҳ�ǹ�ѧ�������ѵ㡣����ʹ�û��α����־��ʵ�������̬���Զ��������������£�
�� ������ͼ����һ���б�־���⣬�����־��Ҫ������Ӧ�ı��뻷��ֵ��
�� ��������6�����Ϲ��������־�������ͼ���ݹ�����������������������
�� ����������е�һ�������ͼ�������Զ���������ɹ�����һ��ͼ�����������Զ���
�� ����ͼ����Զ���ɹ���������һ��ͼ��ͶӰ����Ϊ����ԭ�㽨������ϵ���ؽ������������־�����ά���ꣻ
�� ��δ�����ͼ������������6���������ؽ���־���ͼ��ʹ��ֱ�����Ա任(DLT)�������о��Զ�����ɹ������ؽ�����ͼ���������Ѷ���ͼ����δ�ؽ��Ĺ��������־�㣻
�� �ظ�����ݣ�ֱ��û���µ�ͼ����Ա�����Ϊֹ��
���������������裬�Ϳ���ʵ�������̬���Զ����������̬���Զ������ֱ�����Ա任(DLT)�ķ�����⣬�÷����������Խⷨ��������Ҫ6�������㣬����������������ϸ���������IJ�����ϸ���ܡ�
�����̬��Զ�����ͼ3��ʾ��S1-xyzΪͼ��1�������ϵ��S2-x’y’z’Ϊͼ��2�������ϵ��S2-xyzΪ��S1-xyzƽ�еĸ�������ϵ��S1S2��ƽ��S1xy�н�Ϊv��S1S2��ƽ��S1xy��ͶӰ��������S1x�н�Ϊu�������﷽��P��ͼ��1�ж�Ӧ�����p1��S1-xyz����ϵ����Ϊ(x1,y1,-f)���﷽��P��ͼ��2�ж�Ӧ�����p2��S2-x’y’z’����ϵ����Ϊ(x2’,y2’,-f)��p2��S2-xyz����ϵ����Ϊ(x2,y2,z2)��
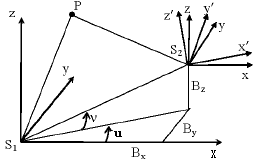
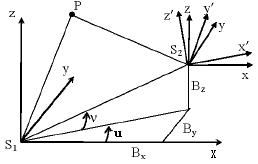
ͼ 3 ��Զ���ʾ��ͼ
S2��S1-xyz����ϵ����Ϊ(Bx,By,Bz)������S2-x’y’z’��S2-xyz����ϵ��ת����ΪR����ΪS1p1��S2p2��S1S2�Ĺ����ϵ�����У�
��1�� ....−....fyxRzyx'2'2222
��2�� 022211=−zyxfyxBzByBx
����
By=Bx*tg(u)≈Bx*u;
Bz=Bx*tg(v)/cos(u) ≈Bx*v��
��˹�ʽ(2)���Լ�Ϊ��
��3�� 0222111=−zyxfyxvu
�ɹ�ʽ(1)��(3)���Կ���ֻҪ����ͼ�����5�����Ϲ�����Ϳ����������Է�λ(u��v��R)��
3������ƽ�������Ա궨
���ڹ����������̵���Ӱ����������ƽ��ⷨ(Method of Bundle Adjustment)����һ�ְѿ��Ƶ��������ꡢ�����������������������ҵ����ҵ�������ݵ�һ���ֻ�ȫ���������۲�ֵ���������ͬʱ��������ǵػ���ֵ�ʹ�����ռ�����ؽ��㷽���������ԭ����ʹ����۲�ֵ�ظ�����V����VTPVΪ��С[3]����ν������Ա궨����ָ������ڡ����������һ��ͬʱ��������ƽ����㣬Ҳ���Ǵ��и��Ӳ������������ƽ����ĵĹ���ƽ���н�����ڲ����������������﷽�������������Ϊ�۲�ֵ�����Ż������ڹ��߷����г�����ƽ������̣�
(4)LXCXBXAV−+=3*2*1*3
���У�X1Ϊ������ڲ����仯����X2Ϊ�����������仯����X3Ϊ��ά����仯����LΪ�۲�����ͼ������ꣻA��B��C�ֱ�����Ӧ�ı仯��ƫ������
�ڹ���ƽ��ʱȫ��Ŀ����������ͷ�ľ�����䡢�������ͱ��⾵���䣬�Խ�����ͶӰ��������Ա궨���ȡ�����ƽ��ʱʹ�õĻ���ģ��[6][7]��
(5) yExEByxxrBrxArxArxAdx*2*12***2)2(*1**3**2**122642+++++++=
(6) 1***2)2(*2**3**2**122642ByxyrBryAryAryAdy+++++=
���У�A1��A2��A3Ϊ������������B1��B2Ϊ������������E1��E2Ϊ���⾵���������
4���DZ����־��ƥ�䡢�ؽ�����У��
��־���ƥ������ڶ��ͼ����Ѱ��ͬһ��������Ӧ�����Ĺ��̡�����ƥ���ڼ�����Ӿ����Ǽ�Ϊ��Ҫ������֮һ�������ܹ��������������źŸ��š���ͷ������������Ӱ�죬�ռ���άĿ�걻ͶӰ����άͼ��ʱ���ڲ�ͬ���ӽ��¿��ܻ��нϴ�ͬ����Ӱ�����г��õ�ƥ���㷨����С����ƥ�䡢����������ƥ�䡢�ͻҶ����ƥ��ȵȡ����ڴ��л��α���ı�־�����ھ���Ψһ��ʶ�ı�����Է�������������������������ƥ�䡣Ȼ��������û�б����Բ�α�־�����ȷƥ��ͳ������⡣�����⼫���ι�ϵ��ƥ���㷨��˫Ŀ�����Ӿ���ֻ���ƶϳ�ƥ�������⼫���ϣ�ƥ�������Խϴ��Ӱ����㷺Ӧ�á�������Ӱ�����д��ڶ�����λ�ã����ö��ͼ���ϵ��⼫��Լ���Ϳ��Դ����߷DZ����־��ƥ�����ȷ�ʣ���ͼ4��
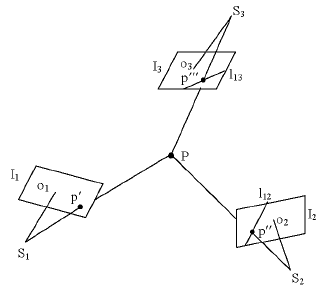
ͼ 4 ��ͼ���⼫��ƥ��ʾ��ͼ
�DZ����־��ƥ��������£�
�� ͼ��S1�б�־��P’��ͼ��S2�ж�Ӧ�����⼫��l12�ϣ���ͼ��S2�з��������ı�־���¼���㼯Q12�У�
�� ͼ��S1�б�־��P’��ͼ��S3�ж�Ӧ�����⼫��l13�ϣ���ͼ��S3�з��������ı�־���¼���㼯Q13�У�
�� �㼯Q12��Q13�е�����ͼ��2��ͼ��3��Ӧ���⼫��ϵ�ĵ�ſ�����ͼ��1�б�־��P’��Ӧ����㣬��������⼫��ϵ�ĵ��ֻ��һ�ԣ�����Ϊƥ��ɹ��������Ȼ���ֶ����ԣ������ʹ�������ͼ������б�
ͨ��ʵ�ʵ�ƥ��ʵ����֤����ͼ�������Ϻõ������£�ƥ����ȷ�ʴ�99%���ϡ�
����ȷ����˷DZ����־���ƥ������Ϳ���ͨ������ڡ�������ؽ����õ����ά����ͱ�־��ƽ�淨��������Ϊ��־�㱾������һ���ĺ��(Լ0.1mm)�������������ؽ����ı�־����ά���겢���ǹ����������ʵ���꣬�����ؽ��õ��ı�־��ƽ�淨���������ȥ����־���ȴ��������õ���ʵ�Ĺ���������ά���ꡣ
3 ʵ�������
��ά��ѧ���ټ��ϵͳ������VC++6.0�¿��������л���ΪWindowsXPϵͳ��Ӳ���ɵ����������NIKON D200����������ơ����Ի��α����־�㡢ʮ�ַ���ߺͶ��������ɡ������������CCD�ߴ�Ϊ��23.6cm×15.8cm�����ش�С��6.09um×6.09um���ֱ���3872×2592����ѧ��ͷ���������20mm������ͷ����ͼ5��ʾ�����㷶ΧԼ1��5�ף�ʹ�����û�������ƣ���֤ͼ����������Ⱦ��⣬��ýϸߵ�ͼ��������

ͼ 5 ��ά��ѧ���ټ��ϵͳ���4
��3��×3��×1�״���ˮ�ֻ�ҶƬΪ�������ͼ6��������沼�û��α����־��ͷDZ����־�㡣

ͼ 6 ˮ�ֻ�ҶƬ
Ϊ��֤ϵͳ�������ȣ���ˮ�ֻ�ҶƬ�����ߴβ�����ѡȡ����������֮�������Ϊ�������ͬʱ��ʹ�õ¹�GOM��˾��ҵ������Ӱ����ϵͳTritopҲ�����ߴβ������Ա�
4 ����
�����
[1] Mignosi,A;Touron,G;ModelDeformation Measurement in the ONERA F1 Wind tunnel[J].Instrumentation in Aerospace Simulation Facilities,2007:1-8.
[2] C.C.Chang,Y.F.Ji. Flexible Videogrammetric Tech- nique for Three-Dimensional Structural Vibration Measurement[J].Journal of Engineering Mechanics, Vol.133,No.6,June 1,2007.
[3] Zhengyou Zhang. A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,VOL. 22,NO. 11,NOV 2000.
[4] Thomas Luhmann.Close Range Photogrammetry[M]. 2000.
[5] Reza Hassanpour,Volkan Atalay. Camera auto- calibration using a sequence of 2D images with small rotations[J].Pattern Recognition Letters,2004:989-997.
[6] Clive S.Fraser. Digital camera self-calibration [J].Photogrammetry & Remote Sensing,1997:149-159.
[7] Sheng-Wen Shih,Yi-Ping Hung.Calibration of an Active Binocular Head[J]. IEEE Transactions on System,man,and Cybernetics-Part A: Systems and Humans,VOL. 28,NO. 4,JULY 1998.
����飺Ф���У�1980�������У�ɽ�������ˣ���ʿ�о�������Ҫ�о�������ά��ѧ������ ������1968�������У�����֣���ˣ������ڣ���ʿ����Ҫ�о�������ά��ѧ�������ڵº루1949�������У�ɽ��̫ԭ�ˣ����ڣ���������Ҫ�о�����ģ���������; �����ڣ�1982�������У�ɽ�������ˣ�˶ʿ�о�������Ҫ�о���������ͼ����