0 �� ��
���������������ִ�����������������������ν�ϵIJ���ǵ����Զ����������һ����Ҫ����������������÷��ٷ�չ�ļ����������ͨ������������ڲ�������Ӳ����Դ�����ơ�������������������ͼ�λ��������߰������ƣ�������ݷ����ʹ������ܣ����������������ʵ�������ļ��������ԺͿ��ƹ���[1, 2]��
DZͧ����Զ��ϵͳ��DZͧ�������Զ����ơ�״̬���Ͱ�ȫ�����豸����DZͧ������ϵͳ�ĺ��IJ���������DZͧ����ϵͳ�İ�ȫ���ɿ�����ʮ����Ҫ����ϵ������DZͧ�İ�ȫ�ԣ��DZ�֤DZͧ�ں��ʺ����ս��ʹ���Ĺؼ����ء���ˣ����������������Σ�������DZͧ���ۺ�ĸ��ȼ�ά�Σ��������DZͧ����Զ��ϵͳ�ĸ���ܽ���ȫ��IJ��ԣ�ʹ������ս����Ҫ��Ŀǰ���ڽ��в���ʱֻ�ܲ����˹����ݡ������б�ķ�ʽ�����̸����ҹ���Ч�ʵ͡����ֲ��Է����Ѿ��������ִ�װ��ά�ޱ��Ϲ�������Ҫ�����������ִ����¼���װ���IJ���Ҫ��[3]���м��ڴˣ����Ľ������������˼�룬�о��˹����Զ�����ϵͳ�ľ�����̣�������ʵ�ֹ����еĹؼ������������Ƴ���ij��DZͧ����Զ��ϵͳ���Զ�����ϵͳ��
1 ����������������巽�����
1.1 �����������
��������Զ��ϵͳ�Ĺ��������Ͳ��Թ�������Ҫ������Ƶ��Զ�����ϵͳӦ�������¹��ܣ�
1�� ����ϵͳ�������Լ���У������
2�� �����Զ����Ժ��˹��������Թ��ܡ�
3�� ���ṩ�����豸���䲿���������������������ļ����źš�ģ�⸺�صȻ���������
4�� �ܶ�����Զ��ϵͳ���й��ܼ������ܲ��ԣ����Խ��Ӧ��ֱ�۵���ʾ��
5�� �����źŴ��������Ϸ��������϶�λ���������ϵ㶨λҪ�����ܾ��塢��ȷ��
���װ����ʵ�����[1, 3]�����Զ�����ϵͳ�������ʱ��Ӧ����ѭ���»���ԭ��
1�� �����㲿����ս������ս����Ϊ����Ŀ�꣬��������װ��ϵͳ�������Ϳɿ��ԣ������ɲ����ԺͿ�ά���ԡ�
2�� �Ӿ�������ϵͳ�ĽǶȳ�������ATS����Ρ�ȫ�������μ��ͨ�û���ϵ�л������������ԭ����ȫ���������öȡ������������ڡ�
3�� Ӧ��ģ�黯����Ʒ���似�������ü��ɻ��Ĺ��췽ʽ��ȷ��ϵͳ���Ƚ��ԡ������ԡ���չ�ԣ���֤����ϵͳ�����Ŀɿ��Ժͳ����ȶ��ԡ�
4�� Ӧ���˹����ܼ������о�����������ۺͷ���������������Ϻ���ˮƽ��������Ч���������ϵͳ��
1.2 �Զ�����ϵͳ���巽�����
�Զ�����ϵͳ�Ļ���˼���ǣ�������ͳ�����ʸ�������ն����ڸò���ʸ�������µ���Ӧ��Ϣ���ٸ��ݼ�������Ӧ֮��Ĺ�ϵ������“����”��“����”��һ�������źţ���˽������������Լ������к���Ӧ���н��з����ʹ������ж������Զ���Ĺ����Ƿ��������������й��Ϸ������϶�λ��
�ھ����������Զ��ϵͳ�Ĺ���ԭ���Ļ����ϣ���Ϲ������Զ����Լ������Ƚ�˼��[4��6]�����ݲ�������ȷ�������о����Զ�����ϵͳ��������Է������£�
1�� �������ܲ��ԡ���Կ���ϵͳ���������й���״̬��������������ϵͳ����������źţ����������źţ��ж����������Ƿ����������й��ϣ�����ȷ��ϵͳ�Ĺ��������벿λ��
2�� �ֻ����ܲ��ԡ����ݸ��ֻ��Ĺ���ԭ�����ܣ�������ֻ�����������źţ����������źţ��ж����ֻ��Ĺ����Ƿ�������
3�� �����豸�Ĺ�����ϡ��ڹ��ػ��Ŀ����£�������Ҫ������豸�ͳ�������ϼ���ʸ����ͨ���ɼ��ؼ�����Ԫ��������Ӧ�źţ����ù����Ĺ�����Ϸ���Ѱ�ҹ���Դ�������϶�λ����·���������ܶ�λ��Ԫ������
2 ϵͳӲ�����
2.1 Զ��ϵͳӲ�����
DZͧ����Զ��ϵͳ��ԭ����Զ��װ�á�������������ź�װ�á���Դ���ź�װ�á�ԭ����״̬��ʾװ����ɣ������ֵ����ӹ�ϵ����DZͧ�������豸�����ӹ�ϵ��ͼ1��ʾ�����߲���ΪDZͧ����Զ��ϵͳ��
Զ��ϵͳ�����ֵ���Ҫ�������£�
1�� ԭ����Զ��װ�á���ԭ��������Զ��״̬ʱ�����ԭ�������̳������������������١�����ͣ����Ӧ��������ͣ����Ӧ������ͣ���ȹ��ܣ���ʾԭ����������״̬�������źš�ͣ���źţ�����������������ź�װ��һ���ԭ�������а�ȫ������
2�� ������������ź�װ�á���ʾ������̥�������״̬������ȫͧ����ϵͳ���źŲ����䷴���źţ���ԭ����Զ��װ��һ���ԭ�������а�ȫ�����������Դ���ź�װ��һ���������Զ��ϵͳ�Ĺ���״̬��
3�� ��Դ���ź�װ�á���DZͧ�����ĵ�Դ��������Զ��ϵͳ�Ĺ���״̬����Դ���䵽����װ�ã�����������������ź�װ��һ���������Զ��ϵͳ�Ĺ���״̬��
4�� ԭ����״̬��ʾװ�á�����ԭ����Զ��װ���и�����״̬��ԭ����������״̬�������źš�ͣ���źŵȽ��и�ʾ��
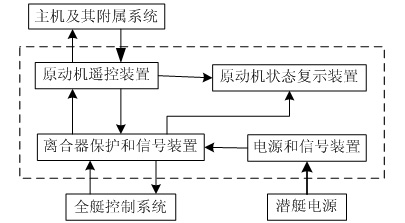
ͼ1 Զ��ϵͳ��ɼ��������豸�����ӹ�ϵ
ͼ2 �Զ�����ϵͳӲ�����ʾ��ͼ
2.2 �Զ�����ϵͳӲ�����
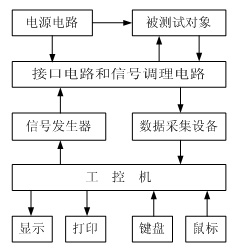
�������þ���Ӳ���١����С�������ᡢ����ǿ����������ǿ���ŵ㡣�봫ͳ����һ���������������Ի���Ϊ���ݲɼ�����ơ����ݷ����봦����������������������ģ�顣�������������˼��[2,7]������Զ�����ϵͳ��Ӳ��ʵ�ַ�����ͼ2��ʾ��
ͼ2�б����Զ����Ǵ����Ե�Զ��ϵͳ��������ijһ�ֻ�����Դ��·��Զ��ϵͳ���źŵ�����·���磬����Զ��ϵͳ��Ҫ��������ĵ�Դ����Ҫ����ר�ŵĵ�Դ����������Ƶ�Դ�任��·��
Ϊ��ʵ��Զ��ϵͳ������ֻ����Զ����ԣ���ҪΪ�����ר�ŵĽӿڵ�·���źŵ�����·���źŷ����������ݲɼ��豸�ͱ����Զ���֮��������źŶ�ͨ�������ݣ�����Ҫ�����У��ٽ��źŷ������������źţ�ģ�������������ȣ�������Ҫת����Զ��ϵͳ���ܽ��ܵ��ź�;�ڽ�Զ��ϵͳ�������źţ�ģ�������������ȣ�ת�������ݲɼ��豸���ܽ��ܵ��źš�
�źŷ���������Ҫ�����ǣ��ڹ��ػ��Ŀ����²�����Ӧ���źţ����źŵ�����·ת�����͵�Զ��ϵͳ������������ʸ����
���ݲɼ��豸����Ҫ�����ǣ��ڹ��ػ��Ŀ����£��ɼ�Զ��ϵͳ�ڼ���ʸ�������µ���Ӧ�źţ������źŵ�����·ת������Ȼ���ź��͵����ػ��������ݷ����ʹ�����
���ػ���������ָ���¿��������Զ�����ϵͳ�����У�Ҳ���˻���������Ҫ;������������Ҫ�����źŷ�������Զ��ϵͳ��������ʸ����ͬʱ��Զ��ϵͳ����Ӧʸ���������ݷ����ʹ������ж��������Ĺ����Ƿ�������������й�����ϣ�����ж�����������Ϣͨ����ʾ�豸������ʾ��ͨ����ӡ�����д�ӡ��
3 �Զ�����ϵͳ���������
����������������������Ŀǰ��Ҫ�����ࣺһ�����ı�ʽ�ı�����ԣ���Visual C++��Visual Basic��C++��LabWindows/CVI��;��һ����ͼ�λ�������ԣ����д����Ե���LabVIEW��HPVEE��[8]��ͼ�λ�������Ժ��ı�ʽ���������ȣ����б�̼�ֱ�ۡ�����Ч�ʸߵ��ص�;���ı�ʽ�����������ԽϺã��û������������ӹ��ܣ����ұ�ͼ�λ��������������Ǯ�͡����ǵ����Զ�����ϵͳ�д������źŷ��桢�źż�⡢���ݴ�����������Ҫ�д�����ͼ�ν��洦����ѡ��LabVIEW��Ϊ��������ƽ̨��������ͼ��ͼ3��ʾ��

ͼ3 �Զ�����ϵͳ���������ͼ
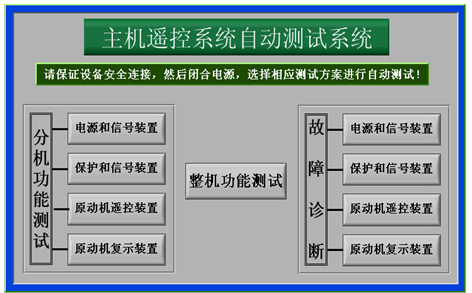
ͼ4 �Զ�����ϵͳ������
ϵͳ���������Ƚ��в���ϵͳ�������Լ죬�����쳣�������Զ�����ϵͳ�����棬��ͼ4��ʾ���û����Ը�����Ҫѡ����Է��������Է�����Ϊ�������֣�
1�� �������ܲ��ԡ�����������ϵ�“�������ܲ���”��ť�����������ܲ��������档������ϵͳ�������豸��������ʱ����Կ���ϵͳ��������й��ܣ���Դ�任���ܡ��ź�ָʾ���ܡ�ԭ�������ƹ��ܡ�Զ�غͱ������ܣ�������ģ�ⱻ�ض���Ĺ������̣����ճ�������������ϵͳ���������źţ����������źţ��������ʸ�������ʸ��֮��Ĺ�ϵ�ж����������Ƿ����������繦�ܲ��Բ������������ϵͳ�й��ϣ������϶�λ���ֻ���
2�� �ֻ����ܲ��ԡ���“�ֻ�����”����������ֻ����ư�ť������Ӧ�ֻ��IJ��Խ��档���ݸ÷ֻ��Ĺ���ԭ�����ܣ�����ģ�ⱻ�ض���Ĺ������̺���������ϵ�������ֻ�������źţ����ճ����������÷ֻ����������źţ����������źţ��������ʸ�������ʸ��֮��Ĺ�ϵ�ж��÷ֻ������Ƿ�������������������÷ֻ��й��ϣ��Ӿ���������Գ���ȷ���÷ֻ��Ĺ������ʺ��ϲ�λ��
3�� �����豸�Ĺ�����ϡ���ͨ��“�������ܲ���”��“�ֻ����ܲ���”�ж���ij���ֻ�����ʱ����Ҫ�Ը÷ֻ����о���Ĺ�����ϡ��������ʱ���Բ��ø��ֹ������Ƚ��Ĺ�����Ϸ�����Ѱ���ϵ�ԭ�����ܽ����϶�λ��Ԫ������������������ʣ�����������©����������ϵͳ�в����Թ�����������Ϊ����ģ������������Ϊ������Ϸ������Թ����豸�������Ĺ��죬��ȡ������ʵ�����ϵķ��������ھ�������乤��ԭ���Ļ����ϣ���ϴ������˹���ϵľ��飬���칫���Ĺ��������������ʱ���Ƚ��������ṹ���������У�Ȼ���ȡ���϶��µķ�ʽ���й�����Ѱ�Ͷ�λ������ʱ�����ػ�������Ҫ����������豸�ͳ����ϼ���ʸ����ͬʱ�ɼ��ؼ�����Ԫ��������Ӧʸ�������ݼ���ʸ������Ӧʸ���Ĺ�ϵ���й��϶�λ������Ҫ��������ʱ������ģ�������������������ռ���Ѱ�����ϵ�����ԭ����Ҫ�˹�����ʱ����������ʾ�û����и������ԣ�����ʾ�˹������ķ�����
4 ����
���ľ�������˹������������������Զ�����ϵͳ�ĸ������ڣ��о���ʵ�ֹ����еĹؼ�����������LabVIEWΪ������������������ij��DZͧ����Զ��ϵͳ���Զ�����ϵͳ�����Զ�����ϵͳ�ܹ�ʵ��Զ��ϵͳ�������ֻ������ܲ��ԣ����ܹ��Թ����豸���о���Ĺ�����ϡ�ʵ��ʹ�ñ��������Զ�����ϵͳ�������ơ�����ֱ�ۡ����ݼ�㡢��������ʸߡ�
�������ߴ��µ㣺
1�� �о��˽�������������Ӧ����Զ��ϵͳ�Զ����Թ����еĹؼ�������
2�� ͨ��������������Ӳ����Դ������������Ӧ����ʵ�ʣ����Ƴ���ij��Զ��ϵͳ�������ֻ����Զ�����ϵͳ��
�����
����[1] ���Ǹ�. �������ߵ��豸�Զ�����ϵͳ�ؼ������о�[D]. ����: �������պ����ѧ, 2002.
����[2] Guiehu W.. Virtual instruments and their application in experiments [J]. Proc. of ICEMI, 1997: 582-584.
����[3] GJB 2547-95, װ�������Դ��, 1995.
����[4] �����. ���յ����豸�����豸������ϼ����о�[D]. �Ͼ�: �Ͼ����պ����ѧ, 2002.
������������[5] L. E Wang, K. C. Tall, X. D. Jiang, etal. A flexible automatic test system for rotating-turbine machinery [J]. IEEE Transactions on Automation Science and Engineering, 2005, 2 ��1��: 1-18.
����[6] ������, ��־��, �߸�����. ����ģ����������״�ӡ�ư����ܹ������ϵͳ�о�[J]. �������Ϣ, 2004, 20��12��: 12-26.
����[7] �¹���, ë�̺�, �ִ�ѫ. �ִ����Ӳ�������[M]. ����: ������ҵ������, 2000.
����[8] ����֥. �ִ����Լ�������������[M]. �������������պ����ѧ�����磬2004.