һ�� Ӧ�ñ���
.���Ź�ҵ�����ͼ���������ķ�չ��ͼ��ɼ��ڹ�ҵ��ط��淢���Ź㷺�����á���һЩ�����Ӧ�������£���Ҫͼ��ɼ��豸ȷ�ز����������ͼ���ڽϵ��ٵ�����£�����ͼ��ɼ�Ƶ������������Ҫ�IJɼ�Ƶ�ʣ�����ʹͼ��ɼ��豸���������ɼ����ں���ͼ������ͨ���������˹��ֶ���ȡ������Ҫ�ļ��ͼ�����ַ���������㣬����������ȱ�㡣�Ƚ����Ե�ȱ���У�1.���ɼ���ͼ�����а�����Ϣ�٣������ʵͣ����ܴܺ־���������ͼ��2.�������ɼ���������ͼ����������������ͼ���ϵ�λ�ûᷢ���ܴ�仯����������ͼ�����δ����������⡣�ܶ���֮������“��ǹ��”ʽ��ͼ��ɼ�����Ч�ʵͣ�����ͼ�������������ܴ������������ʵ�ʹ���Ӧ���в������˶�����ij��ϣ�����������ij���Ƶ����ͼ��ɼ��豸�IJɼ�Ƶ���൱�����������ڲɼ�Ƶ�ʡ������������������ɼ�����������Ӧ������µIJɼ���Ҫ�������Ҫ�ϸ����ͼ��ɼ��豸���ع�ʱ�̣��Ա�ȷ�������徭���ӳ������ʱ�̲���Ŀ�ꡣʵ�ִ�Ŀ�ĵķ�����������һ�������徭���ӳ�ʱ����ͬ���ĵ��źţ����Դ˵��ź����ⴥ���ķ�ʽ����ͼ��ɼ��豸�Ĺ������������ж�������ⴥ���ź�����ͼ��ɼ��豸����ض��ɼ�������������1����2�������ij������ת�����װ������תҶƬ���ֽ��������Ǽ����������������һ�ֻ���labview���ݲɼ�����̵��ⴥ������ɼ�ϵͳ����ϵͳͨ�������·���ڶϣ���������ת��ҶƬλ���Ե��źŵ���ʽ���ֳ������ٴ������ݲɼ���������ϵͳ���б任�����ӹ����ͬ���ź����ⴥ����ʽ���������ǵIJɼ��������������ҶƬת�ټ��ߺͼ�¼��ͬҶƬ��Ϣ���������Ǽ����˲ɼ���ʱ�趨��ɼ���Ƶ�趨�ȹ��ܡ�����Ч���ܺõ������ʵ�ʲɼ����������ҿ���Ӧ�õ��պ�ĸ�ת�ٳ��ϵ�ͼ��ɼ���ȥ��
����ͬ���ź�ϵͳ���
1.���Ŀ��
��ϵͳ���ڲ�ij������ת�ֻ��и�ҶƬ���ȷֲ�ͼ���ֻ���תת�����ֵ6000ת/���ӣ���ת����������6��ҶƬ��������ҶƬͨ���ӳ����1.67ms����600Hz����������Ч�ɼ�Ƶ�ʼ���Լ60Hz��ͼ��ɼ��ӳ���Ϊת�����Ϸ���һԲ�ι۲�ף���ʹ�ý���ҶƬǡ�ô���ת�����Ϸ�ʱ���ܹ��������Dz��������Ҫ����һ�βɼ�����ͬʱ��6��ҶƬ�ֱ������ͼ��⡣
����ҶƬ�������ӳ���Ƶ�������������Dzɼ�Ƶ�ʣ�����ʹ�������ǵIJɼ�Ƶ�����ﵽҪ����Ҳ���ѱ�֤�ɼ�ʱҶƬ�����ӳ�����λ�á���ˣ���Ҫ����һ����ҶƬλ����ص�ͬ���źţ������������������ⴥ��ģʽ�½��й������ﵽȷ��ҶƬͼ���Ŀ�ġ�
2.�������
����ϵͳ����ṹ��ͼ1��ʾ��
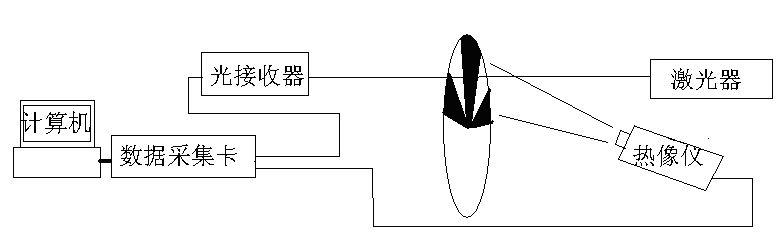
ͼ1 ͬ���ź�ϵͳ�������
Fig.1 Overall design for synchronous signal system
�������������ļ��⾭���ֻ�ҶƬ�ĵ��ƣ������ƹ������������������ա������ƹ����Ĺ�ǿ�仯��ӳ����ҶƬ��λ�ü�Ƶ����Ϣ���ù����������������պ����õ��źŴ��������ݲɼ��������ɼ����ͨ���㷨������д������������������ǽ���ͼ��ɼ����ⴥ���źš����������źŵĵ�ƽ��ҶƬλ�õı仯��������Ӧ�ı仯����������ͬ���źš�ϵͳ������ʾ��ͼ��ͼ2��
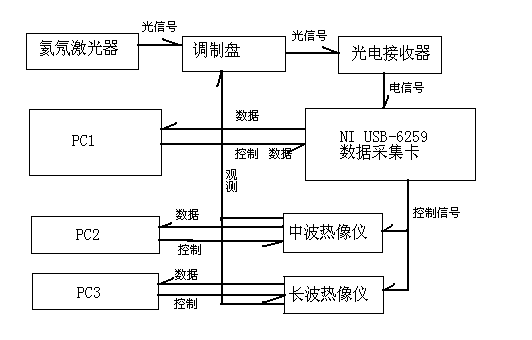
ͼ2 ͬ���ź�ϵͳ������
Fig.2 Data flow for synchronous signal system
3.ͬ��ԭ��
����ͬ���ź�����ϵͳ�Ĺ���ģʽ�����ڹ�ѧ�е�ն������������ת��ҶƬ���ϵ��ظ��и��ڱΡ��������պñ��и��˲������ɻ�е�ṹ��ȷ�ض�Ӧ��ҶƬ��λ�ã���ʱҶƬ��λ���ǹ̶��ģ�����ʱ��ͨ������������ת����ӳ�ڵ��ź��Ͼ����źŵ������ء����ź��������ص�λ����ҶƬ�������ض�λ�õ�ʱ�����Ӧ������������֮���ʱ���϶���ź����ڣ�������ҶƬ�и������ʱ������Ӧ���ź�ռ������ֻ�ҶƬ�ߴ����Ӧ���ź��������������ֻ�ҶƬ�������Ӧ���ź�˲ʱƵ�����ֻ�ת�����Ӧ�����������ݵ��źſ��Է�ӳ���ֻ���ת�������
����ҶƬ�ܹ��������ӳ���Ƶ��Ϊ600Hz���������������Ч�ɼ�Ƶ��ԼΪ60Hz�����Լ�ʹ������������ٶȹ�����Ҳ�������ɼ�������ҶƬ�ֱ�ͨ���ӳ�����ʱ�������Ϊ�˿˷���һ�ˣ����������βɼ��м��������ڵķ���������ҶƬ�����ڵ���6n+1���Σ�nΪ��������ʱ�������ǽ���һ��ͼ��ɼ��������Ƚ���������ǵ��������������������⣬���ܱ�֤�ɼ�����ͼ��������ҶƬ����һһ��Ӧ��ͬʱ��������������βɼ������������ڵ���Ϊ6n�Σ������ʵ�ֶԵ�һҶƬ�ļ�⡣���ǵ�Ϊ����������������أ��趨�������βɼ������������ڵ���Ϊ13�Σ���������ʵ�ʲɼ�Ƶ��Ϊ46Hz��
�ڹ����������ɼ������ź��У��������ش����ֻ�ҶƬ��Ե�˶����պ��и������λ�ã�����δ�����������ӳ����ġ���������ͬ���ź�����ڽ������ɼ��ź�Ӧ����һ����ʱ���Բ���ҶƬ���и�λ���˶����ӳ�������������ʱ�������ϣ�����ʱֵӦ��˲ʱת�ٳ�������ع�ϵ��
�źŵķ�Ƶ����ʱ���Ӿ��ɼ�����������ݲɼ�����ɡ����ɵ�ͬ���ź������ݲɼ�����ͬ���������������ǵ��ⴥ���źŽ���ˣ�ָ�������ǵ�ͼ��ɼ�������Ϊ������ϵͳ�ɿ��ԣ��ɲ�ȡһЩ������ʩ���ڹ�������ǰ���ӹ������ƹ�������ÿɿ������������½��ء��ڹ������������ݲɼ��������ʩ���ش�������ʹ�ź��ڽ������ݲɼ���ǰ���Ϻõ����Ρ�
4.Labview��������
��ϵͳ��Labview�������źŵı任��Ҫ�ֱ�ͨ�������������Ĵ���������ɡ�3����
������0������������������ģʽ��Continuous Pulse Train Generation��������ʱ��ͼ��ͼ3��ʾ���ü������Ĺ�����ͨ���趨high ticks��low ticks����ԭ�źŵķ�Ƶ��������0��source�˽ӹ������������ĵ��źţ���ǰ���high ticks��low ticks����ֵ�ֱ���Ϊm��n�������͵õ���ԭ�źŵ�1 /��m+n����Ƶ��ռ���m/��m+n����
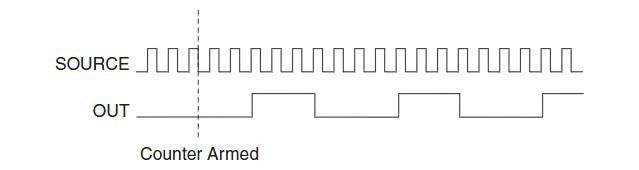
ͼ3 �����������ɼ�����ʱ��ͼ
Fig.3 timing diagram of Continuous Pulse Train Generation
������1�����ڿ����õĵ����崥��ģʽ(Retriggerable Single Pulse Generation��������ʱ��ͼ������ʾ���ü������Ĺ������ڼ�����0����ķ�Ƶ�ź��ϸ���һ����ʱ����������������Ŀ��ȡ���ʱ����������Ⱦ�ͨ��һ��ʱ���źŵ����������ж�������Ƶ�źŽ��������1��gate�ˣ�ʱ���źű����õ�source�ˣ�ͨ��ʱ���ź�Ϊ�ڲ�ʱ�ӣ����÷�ʽΪ�������ã���
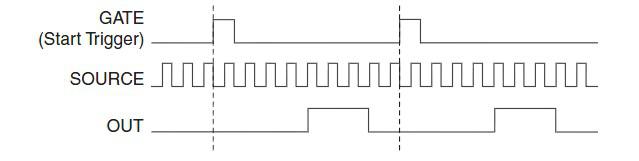
ͼ4 �����õ����崥��ʱ��ͼ
Fig.4 timing diagram of Retriggerable Single Pulse Generation
ͨ��������������ԭʼ�źž�����Ƶ����ʱ���Ӻ����Σ�����ͬ�����ֻ�ҶƬ�����������ӳ������ͬ���źš���ʱ��ͼ��ͼ5����ʱ��ͼ����counter0����high tick=2��low tick=4��counter2��low tick=200Ϊ����
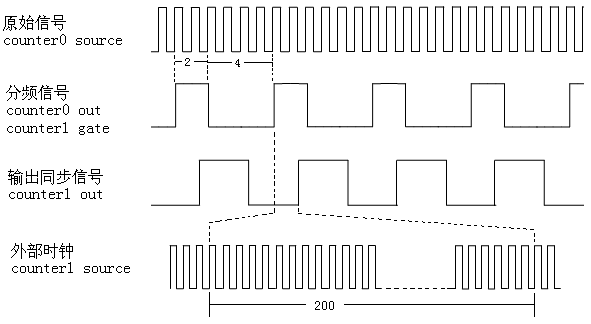
ͼ5 ��ʱ��ͼ
Fig.5 Total timing diagram
����ϵͳ��������
1.Ӳ��ѡ��
��ϵͳ���ô�����Ҷ�����̵Ĺ�ѧն����ģ���ֻ�ת�����̣���������ͬ���ź�ϵͳ�Ŀɿ��ԡ���������ѡ�����±���
��1 ���������ͺ�
Tab.1 Part of the equipment’s type
|
������
|
He-Ne������������632.8nm
|
|
��������
|
E18-M8NK
|
|
���ݲɼ���
|
National Instrument��˾USB6259��
|
|
Labview�����汾
|
2009�� vision9.0
|
|
������
|
Jade�������
|
2.���ݲɼ�����Labview����
����ʵ��ͬʱ�ڼ��������������vi���ֱ����������������Ĺ��������Ӧ�������趨��NIUSB6259�����ݲɼ���Ҫ�����ݲɼ���Ӳ�����߷�ʽ���£�
��1�� ԭʼ�����ź���pin75��pin82���룬��������0����ˣ�
��2�� pin89��pin77��������0������˽��������1��gate�ˣ�
��3�� pin91��pin92������ɵ�ͬ���źţ���ͬ�����������������External trigger�ˡ�
3.������̼����
3.1��ͨ�ɼ�
�������ǽ��б궨����25HzƵ�ʽ�����ͨͼ��ɼ���Ч����ͼ6��ʾ���ɸ�֡ͼ��ɿ�����ҶƬ���ֵ�λ�þ�������ԡ�

ͼ6 ��ͨ�ɼ���ʽ�IJɼ����
Fig.6 Acquisition result of ordinally acquisition method
3.2.���вɼ�ģʽ
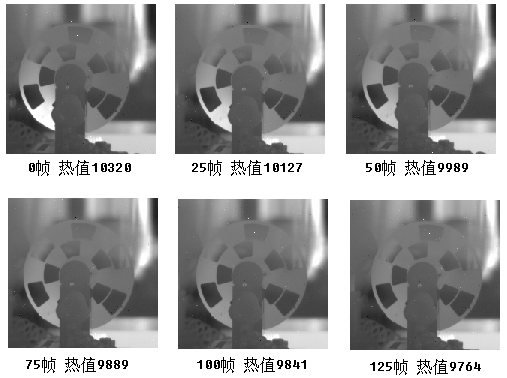
�����ⴥ���ɼ�������������ģʽ��Ϊ�ⴥ������Ƶ���趨Ϊ1/13������ͬ���ź�������������external trigger�ˣ���ʼͼ��ɼ������ö�֡ͼ����ͼ7��
ͼ7 1/13��Ƶ��ͬ���źŲɼ����
Fig.7 acquisition result of synchronous signal method with 1/13 frequency division
���Կ�������֡ͼ����ҶƬλ�÷ֲ�����ͬ��˵�������ǵ����㲶��ͬ����ҶƬλ�ã�ͬ���źž��кܺõ�ͬ��Ч����
3.3.��һҶƬ�ɼ�ģʽ
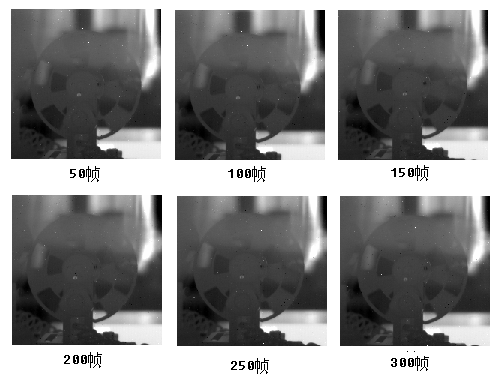
����ʱ��0������vi��low ticks�趨Ϊ12����ʱ����ͬ���ź�Ƶ����ԭʼ�ź�Ƶ�ʵ�1/12����ʱն������ҶƬλ����ͼ���Ϲ̶�������ʹijһҶƬ�¶����ߣ��������Dzɼ����֡ͼ����ͼ8��
ͼ8 1/12��Ƶ��ͬ���źŲɼ����
Fig.8 acquisition result of synchronous signal method with 1/12 frequency division
���Կ�������֡ͼ��������ҶƬλ�ù̶���λ���·�ƫ��ն����ҶƬ����ͬ��Ч�����á����ڸù���״̬���ܹ�����ع۲쵽����ҶƬ����ת�����еĽ��¹��̡�
�ġ��ܽ�
���Ľ�����һ�������ڶԸ����˶�������������ظ�ͼ��ɼ��ķ������÷������ڹ��ת����Labview�����ļ�����Ӧ�ã���Ҫԭ�����ɱ�����Լ���������е��ƣ����õ��ƹ⾭�����ת����ԭʼ�ĵ����źţ����ɼ���������ݲɼ������źŽ��з�Ƶ����ʱ���Ӻ����Σ����ͬ���ڱ��������ͬ���źš�����ϵͳӲ���ܹ������У����ܸ���ʵ����Ҫ�ı�����趨�������ǿ������ʵ����֤��ϵͳ�ܹ����ɾ�ȷ��ͬ���ź������������ǶԸ�����ת��IJ���
�����
1. LIU Gan-yong��LUXiao-xu��ZHANG Qing-sheng,YU Qing-tin, Optical real-time phase-shifting inmge acquisition system based on Labview,Laser Journal(�����£��������������������ã�����LabVIEW ��ʵʱ��ѧ����ͼ��ɼ�ϵͳ��������־)2009��Vol.30 No.3, 26-27
2. JIANG Guang-wen, CHAo Zhi-chao, JIANG He-ping, FU Si-hua, Synchronous image acquisition and processing system of multiplecameras based on source trigger and software control, Journal of Applied Optics(�����ģ���־���� ����ƽ ����˼��,�����ⴥ�����������ƵĶ������ͬ���ɼ�����ϵͳ,Ӧ�ù�ѧ)2009 Vol.30 No.5 756-760
3. Yang Zhong-qiu, Zhu Li-jun,a method to establish software timer of high precision in Labview, Micro Computer(�������������һ����LabVIEW�й����߾���������ʱ���ķ������������Ϣ)2004(3),53-54
Synchronous image acquisition system of thermal camera based on external triggering and Labview
Abstract��Image acquisition with external trigger has a broad application in NDE and other fields of industry control, in which the key point is the creation of synchronous signal for external trigger. In this paper, a synchronous signal creation system is designed using Labview. The system create a external trigger signal through NI DAQ to drive thermal camera, cooperating with thermal camera and other equipments to have a real-time investigation towards high-speed turbine blades. It can be set appropriatly to meet the demand of thermal cameras with different type or other image acquisition apparetus. It has a good versatility.